How I work
Start where the robot fails.
I like models that survive the field: bad lighting, noisy sensors, tight GPUs, awkward data, and deployment scripts that nobody wants to debug at midnight.
About me
Computer Vision and AI Engineer turning deep learning from promising notebooks into systems that run on robots, edge devices, and production pipelines.
My sweet spot is the practical stretch between a good model and a dependable product: messy sensor data, latency budgets, reproducible training, Dockerized deployment, and the last 10% that makes it usable.
How I work
I like models that survive the field: bad lighting, noisy sensors, tight GPUs, awkward data, and deployment scripts that nobody wants to debug at midnight.
What I build
Training pipelines, perception stacks, sensor-fusion workflows, and backend services should make accuracy, latency, memory, and failure modes visible from day one.
What matters
The best ML work is often invisible: reproducible experiments, clean benchmarks, reliable CI, hardware-aware deployment, and simple tools that keep teams moving.
Career
I work where AI meets physical systems: perception models, robotics deployment, multimodal sensing, and the infrastructure that turns experiments into repeatable engineering.
Education
Jain University, Bangalore
CGPA 1.67Aug 2017 - Jun 2021
Built the hardware-first foundation: signal processing, embedded systems, C/C++, and the physics of sensors before data reaches the model.
B.Tech final year project
Jain University, Bangalore
Oct 2020 - Mar 2021
Trained an intent-classification pipeline on real student query data so the university support desk could respond faster.
Industry
DXC Technology · Bangalore, India
Sep 2021 - Aug 2022
Owned the full problem lifecycle: from chaos to closure, so the same fire never broke out twice.
Education · Long-running
Technische Universität Darmstadt
CGPA 2.1Oct 2022 - Present
The container for the later work: ML theory, computer vision, networking, and systems studied in parallel with research and industry execution.
Seminar Paper · Summer 2024
TU Darmstadt · MMC Seminar
Apr 2024 - Jun 2024
How much security is a container runtime actually buying you, and what does it cost in performance? This seminar reviewed container-runtime research from the last five years to give practitioners a principled framework for choosing between isolation, speed, and operational fit.
Motivation
As container deployments move into security-sensitive domains, the default choice of runtime, runC, is no longer always enough. The runtime landscape is fragmented across alternatives such as gVisor, Kata Containers, Firecracker, and Nabla, with few unified comparisons for practitioner decision-making.
Systematic review
Decision framework
Benchmarking gaps
Paper
Key findings
Research · TU Darmstadt
Nov 2023 - April 2026
TU Darmstadt research experience across simulation, secure mobile networking, and multimedia communications systems.
Built packet-matching and workload-modelling systems for 5G UPF performance analysis and repeatable synthetic load generation.
5G UPF packet matching
Workload modelling and synthetic simulation
Because manually onboarding and offboarding users is how data breaches happen, and someone had to fix it.
Built a full geospatial-to-simulation pipeline for Frankfurt city and then tuned it until 15,000 cars stopped gridlocking each other.
Industry · Primary role
Energy Robotics · Darmstadt, Germany
Apr 2024 - Apr 2026
Built perception, deployment, automation, and observability systems for robot software running on edge hardware.
Model development & training
Sensor fusion & edge deployment
MLOps & infrastructure
Observability & distributed systems
Master's thesis · Fraunhofer IGD
Fraunhofer IGD x TU Darmstadt
Aug 2025 - Feb 2026
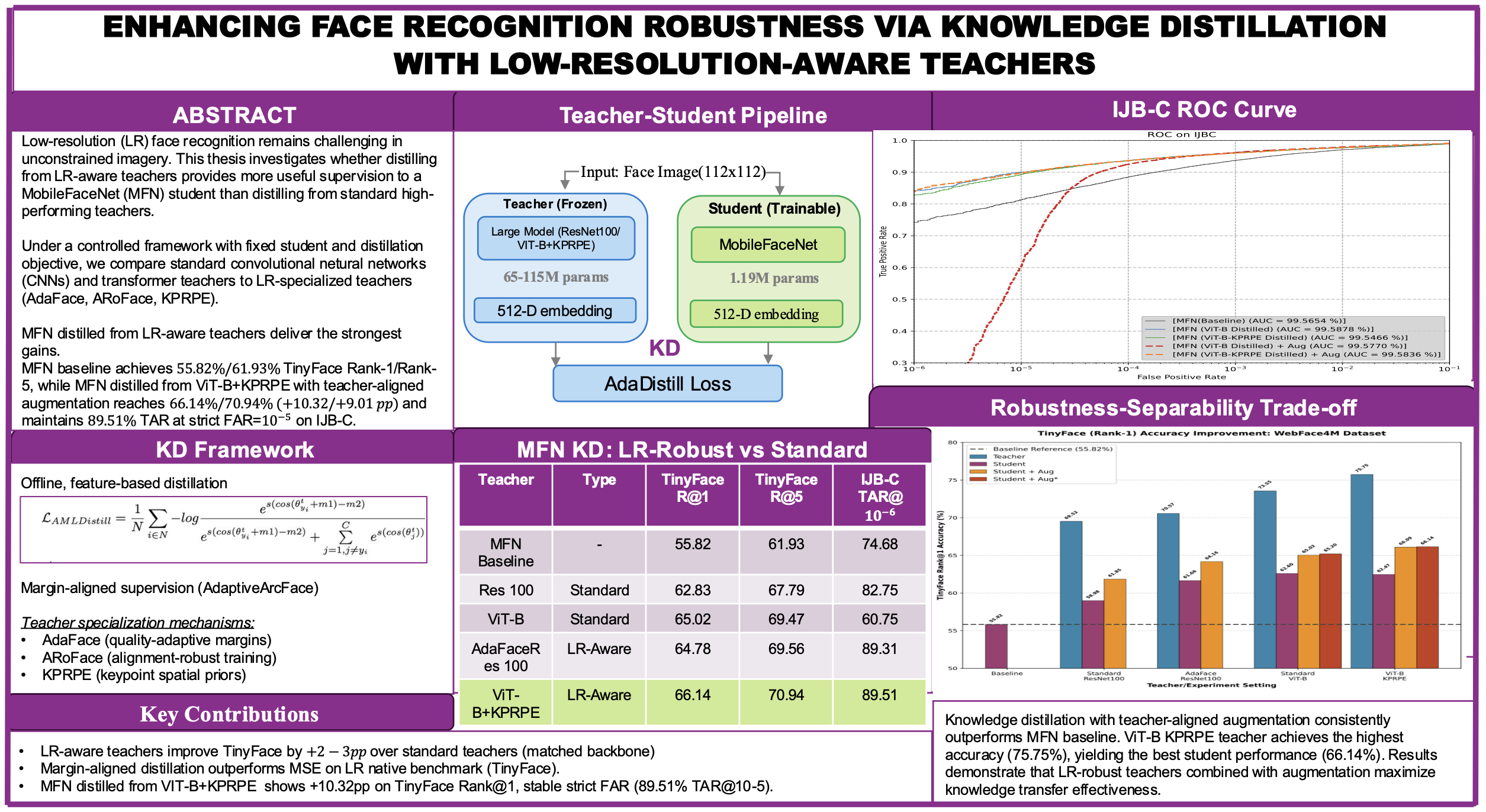
How do you make a lightweight face recognition model robust to low-resolution inputs — without sacrificing accuracy? By teaching it from a teacher that has already seen the degradation.
Problem
Standard knowledge distillation transfers representations from large teachers to compact students — but ignores the resolution gap. Real-world deployments such as surveillance, robotics, and edge cameras often serve low-resolution inputs that trained models were never exposed to.
Approach
Result
Hackathons & Projects
A place for project work, hackathon prototypes, experiments, demos, repos, and the small engineering stories that deserve more context than a GitHub card.
AI Systems
Local implementation of the OpenClaw hybrid memory architecture for long-running agent sessions.
Feb 2026
LLM agents lose context across sessions. This is a local implementation of the OpenClaw hybrid memory architecture — studying how production-grade agent memory actually works, then building it from scratch.
3D Computer Vision
Modular sensor-fusion pipeline for reliable 3D scene understanding using camera texture and LiDAR geometry.
Feb to May 2025
Cameras capture texture, and LiDAR captures geometry. This project combines both signals in a modular fusion pipeline and benchmarks where fusion has the most impact.
The engineering problem
Applicable toAutonomous vehicles, industrial inspection, robot perception, and domains that need reliable 3D scene understanding.
Edge AI · MLOps
On-device safety monitoring with real-time anonymisation and PPE detection for industrial environments.
May to Jun 2024
Safety compliance and privacy are usually in tension on factory floors. This project anonymises people in real time while keeping PPE detection intact, with deployment and benchmarking handled entirely on-device.
Q-Hack 2026
University of Mannheim hackathon build for household grocery planning and real-time cart collaboration.
Apr 8 to Apr 10, 2026
Most grocery apps remember what you bought. We built one that predicts what a household needs before the app is opened, fills the cart for review, handles missing inventory, and keeps every shopper in sync.
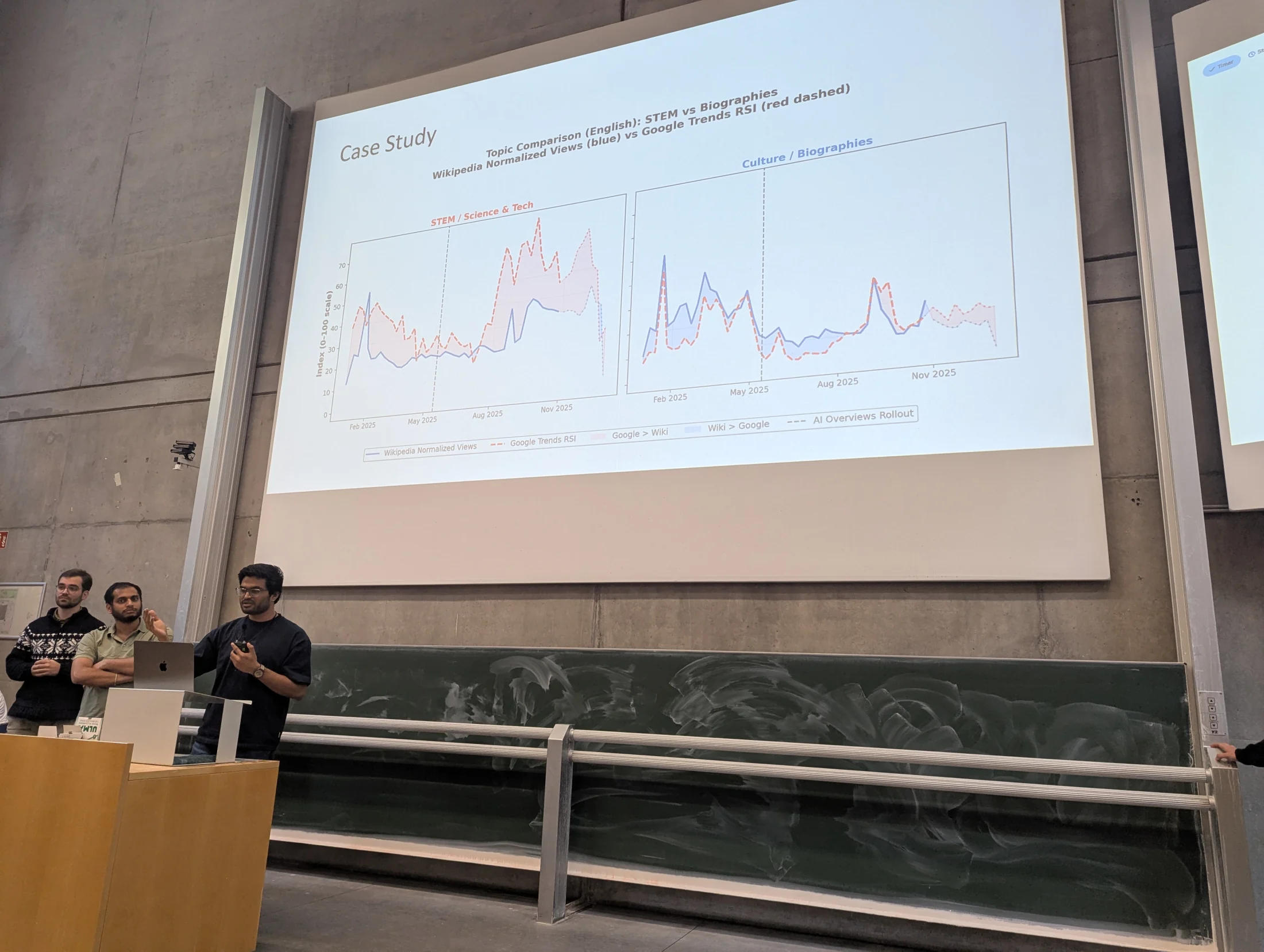
DataFest 2026
Cross-language analysis of how Google AI Overviews align with Wikipedia traffic signals.
Mar 2026
Everyone said AI Overviews would kill Wikipedia traffic. We measured the signal directly across 10 language editions, 100 articles per edition, and windows before and after the May 2025 rollout.
GitHub
Navi keeps walking until you ask something. Send a question and Navi checks with Lexi, the repo-savvy twin who reads my GitHub and brings back the answer.
Repo-only questions
Contact
Use the form below, send a message to sumanth.rc@icloud.com, or write me on LinkedIn or GitHub.